로봇팔 팔레타이저, 로봇팔레타이징, 로봇팔레타이징 시스템

팔레타이징 로봇은 주로 팔레타이징 작업에 적합하도록 설계되었습니다. 다관절 암은 콤팩트한 구조를 가지고 있어 콤팩트한 백엔드 포장 공정에 통합될 수 있습니다. 동시에, 로봇은 암의 스윙을 통해 물품을 핸들링하여 이전 입고 자재와 이후 팔레타이징 자재를 연결함으로써 포장 시간을 크게 단축하고 생산 효율을 향상시킵니다.
팔레타이징 로봇은 매우 높은 정밀도, 정확한 픽킹 앤 플레이스, 그리고 빠른 응답 속도를 자랑합니다. 로봇의 팔레타이징 동작 및 구동은 전용 서보 및 제어 시스템을 통해 구현됩니다. 티치 펜던트 또는 오프라인 프로그래밍을 통해 반복적으로 프로그래밍하여 다양한 제품 배치에 대해 서로 다른 코드를 적용할 수 있습니다. 적재 모드를 빠르게 전환할 수 있으며, 여러 생산 라인에서 단일 기계의 팔레타이징 작업을 구현할 수 있습니다!
연락하다:[이메일 보호]왓츠앱: +8618020515386

로봇 팔 팔레타이저, 로봇 백 팔레타이저

자동 로봇 팔레타이저, 로봇 팔레타이징 장비
특성:
1. 구조가 간단하고, 부품이 적으며, 고장률이 낮고 유지관리가 편리합니다.
2. 차지하는 공간이 적어 생산 라인의 배치에 좋고 창고 면적도 더 넓어집니다.
3. 뛰어난 적용성. 제품의 크기, 부피, 형태가 변경되더라도 터치스크린의 매개변수만 조정하면 됩니다. 다양한 그립퍼를 사용하여 가방, 통, 상자 등을 잡을 수 있습니다.
4. 낮은 에너지 소비 및 운영 비용 절감
5. 조작이 간단하고, 시작점과 배치점만 찾으면 되며, 교육방법도 간단하고 이해하기 쉽습니다.
로봇 그리퍼
다양한 산업의 다양한 요구에 맞춰 다양한 로봇 그리퍼를 맞춤 제작하세요.

그랩 그리퍼

스플린트 그리퍼
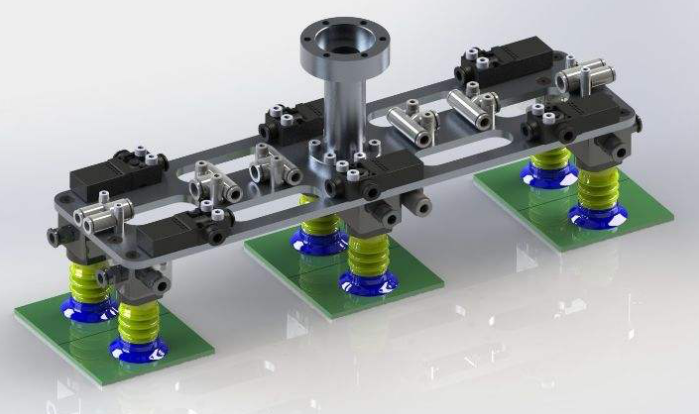
진공 그리퍼, 로봇 흡입 그리퍼
협력 파트너:

관련 상품
-

고효율 자동 플라스틱 병 로봇...
소개 로봇 자동 포장기는 광범위한 적용 범위를 자랑하며, 작은 면적에도 적용 가능하고, 안정적인 성능과 간편한 조작을 자랑합니다. 식품, 화학, 의약품, 소금 등 다양한 제품의 고속 자동 포장 생산 라인에 널리 사용될 수 있으며, 모션 제어 및 추적 성능을 갖추고 있어 유연 포장 시스템에 매우 적합하며, 포장 사이클 시간을 크게 단축합니다. 다양한 제품 맞춤형 그리퍼를 제공합니다. 로봇 팔레트...