DCS-VSFD 超微粉脱気袋詰め機、脱気装置付き粉体袋詰め機、脱気包装スケール

製品説明:
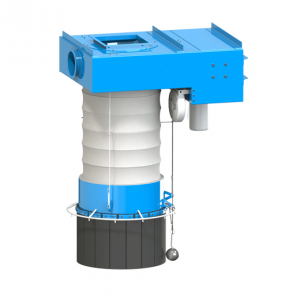
DCS-VSFD粉体脱気袋詰め機は、100メッシュから8000メッシュまでの超微粉体に適しています。脱気、リフト充填、計量、包装、搬送などの作業をすべて1台でこなすことができます。
特徴:
1. 垂直スパイラル供給と逆撹拌の組み合わせにより、供給がより安定し、コーンボトム型切断バルブと連携して、供給プロセス中の材料の制御性を確保します。
2. 装置全体には開閉可能なサイロとクイックリリーススクリューアセンブリが装備されているため、装置全体の材料と接触する部分は、死角がなく、簡単かつ迅速に洗浄されます。
3. 持ち上げ計量とスクリュー真空脱気充填装置を組み合わせることで、包装の精度を確保しながらも粉塵が舞い上がる場所がありません。
4. タッチスクリーンのマンマシンインターフェース、便利で直感的な操作、パッケージ仕様の調整が可能、作業ステータスをいつでも切り替えることができます。
ビデオ:
適用材料:
技術的パラメータ:
計量範囲:10~25kg / 袋
包装精度≤±0.2%
梱包速度:1~3袋/分
電源380V、50/60Hz
脱ガスユニット:あり
電力: 5KW
重量530kg
製品写真:



私たちの構成:

生産ライン:

プロジェクトは以下を表示します:

その他の補助装置:

接触:
ヤーク氏
WhatsApp: +8618020515386
アレックスさん
WhatsApp:+8613382200234
関連製品
-

超音波シーリングバルブバッグ包装機、Ai...
製品説明:自動超音波シーラー付きバルブバッグ充填機は、超微粉体用の環境に優しい包装機です。乾燥粉末モルタル、パテ粉末、セメント、セラミックタイル粉末、化学工業などの分野で、バルブバッグ包装の自動超音波シーリングに特化して設計されています。本装置のマイクロコンピュータシステムは、工業用部品とSTMプロセスによって製造されており、強力な機能、高い信頼性、優れた適応性を備えています。
-

ワンカットバッグスリッター、自動バッグ開閉機
ワンカット式バッグスリッターは、産業用途における材料バッグの自動開封と空袋化のために設計された、先進的で効率的なソリューションです。この機械はバッグのスリッティング工程を合理化し、材料ロスを最小限に抑え、高い作業効率を実現します。化学薬品、食品加工、医薬品、建設資材など、バルク材料を扱う業界に最適です。機能:本機の操作は…
-
伸縮シュート、ローディングベローズ
製品説明:JLSGシリーズのバルク材用伸縮シュート、穀物アンローディングチューブは、国際規格に基づいて設計・製造されています。有名ブランドの減速機と耐曝露制御キャビンを採用し、高粉塵環境でも信頼性の高い動作を実現します。本装置は、斬新な構造、高度な自動化、高効率、低い作業強度、防塵性、環境保護など、多くの優れた特徴を備えています。穀物、セメント、その他の大型バルク材の積載に広く使用されています。
-

DCS-VSF 微粉バッグ充填機、粉体オーガー充填機...
製品説明:DCS-VSF微粉バッグ充填機は、主に超微粉向けに開発・設計されており、高精度包装の要件を満たすことができます。タルカムパウダー、ホワイトカーボンブラック、活性炭、パテパウダーなどの超微粉に適しています。ビデオ:適用材料:技術パラメータ:測定方法:垂直スクリュー式倍速充填 充填重量:10~25kg 包装精度:±0.2% 充填速度:1~3袋/分 電源:380V(30/60Hz)…
-

バルクバッグローダー、バルクフィラー、バルクバッグ充填...
製品説明:バルクバッグローダーは、トン袋入りの粉粒体材料の自動包装に特化しており、高度な自動化を実現しています。自動充填、自動袋詰め、自動分離機能を備え、人件費と労働強度を大幅に削減します。構造はシンプルで壊れにくい設計です。高度な自動化と自動分離により、作業者の作業負荷を軽減します。自動バッグパッティング機能により、積載能力と包装効率が向上します。
-

自動バルブ袋詰めシステム、バルブバッグ自動...
製品説明:自動バルブ式袋詰めシステムは、自動袋ライブラリ、袋マニピュレーター、再チェックシール装置などで構成されており、バルブ式袋からバルブ式袋詰め機への袋の装填を自動で行います。袋のスタックを自動袋ライブラリに手動でセットすると、自動的に袋のスタックがピッキングエリアに送られます。ピッキングエリアの袋がなくなると、自動袋倉庫が次の袋のスタックをピッキングエリアに送ります。ピッキングエリアの袋がなくなると、自動袋倉庫が次の袋のスタックを自動的にピッキングエリアに送ります。…